총괄
-
소개
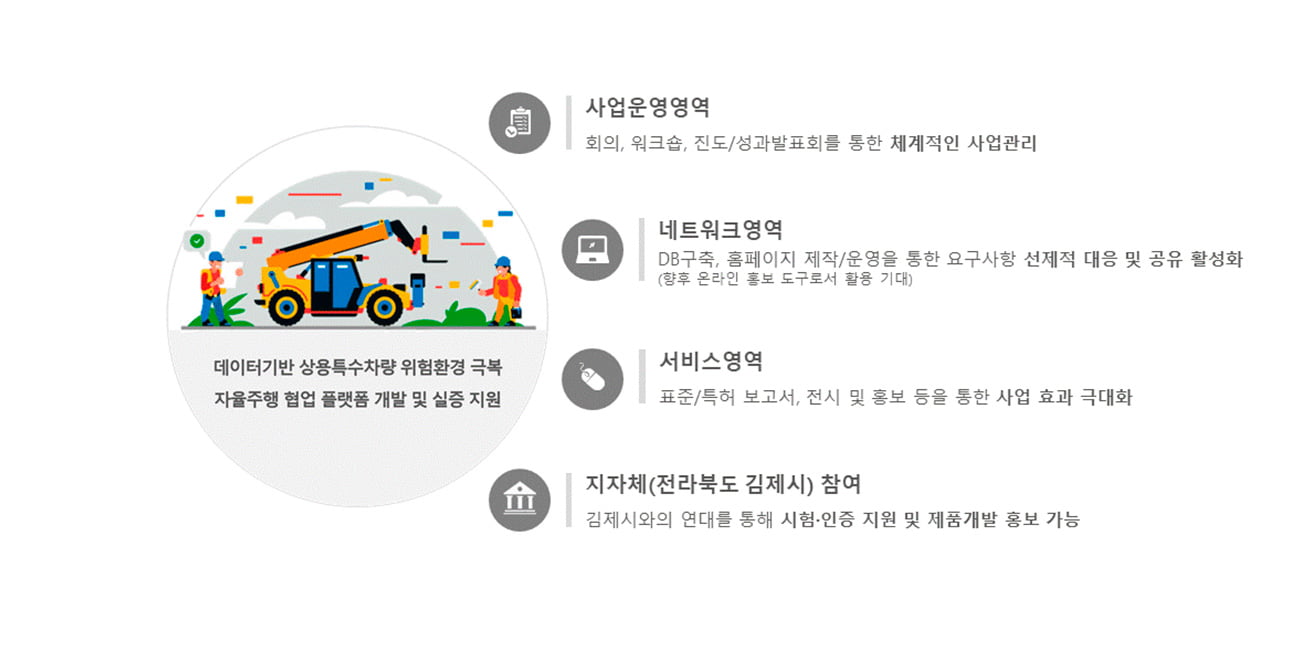
데이터기반 상용특수차량 위험환경 극복 자율주행 협업 플랫폼 개발 및 실증
-
최종목표
위험 환경 하 주요 상용차에 대한 ‘사고율 제로’ 플랫폼 기술확보 및 실증을 위한 총괄 사업지원
-
 NO.01
NO.01협업 플랫폼
요구사항 정의 -
 NO.02
NO.02작업 안전
생태계 육성 -
 NO.03
NO.03과제 지원 등
사업총괄 -
 NO.04
NO.04실증시나리오
검증지원
1세부
-
소개
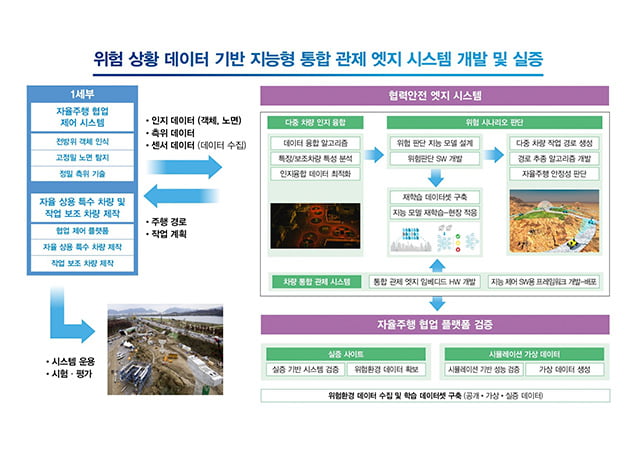
상용특수 및 작업보조 차량의 자율 주행 협업 제어 플랫폼 개발
-
최종목표
상용 특수차량과 협업 제어가 가능한 작업보조 차량 플랫폼 개발 및 작업 안정성 확보를 위한 데이터 융합기반 지능제어기술 개발

세부 연구개발내용
- 상용 특수 및 작업 보조차량 협업 제어 플랫폼
- 위험 환경의 안전한 작업 환경 제공을 위한 스캐닝
- 특장차 특화 자율주행 모드
- 전방주행 3D 노면인식 기반 아웃트리거 제어 모듈
- 작업 보조 차량 협업제어 및 진보된 작업환경 스캐닝을 통한 사고제로 플랫폼 개발
공동연구개발기관별
담당업무
- HR E&I - 전기구동 특장차(텔레핸들러) 플랫폼 개발 및 사업화
- ㈜만도 - 작업 보조차량 개발을 통한 협업 제어기술 실증 및 상용화
- 한국전자기술연구원 - 특장차 자율주행, 아웃트리거 제어기술, 전방위 인지판단 및 협업제어기술 개발
- ㈜신한전자기기 - 특장차 작업붐 제어 및 전자식 AML 개발
- ㈜아이센트 - 라이다 기반 객체 인지 판단 기술 개발
- 일리노이공대 - 센서융합, 인지판단기술 및 딥러닝을 통한 시스템 최적화
2세부
-
소개
엣지기반 위험환경 데이터 분석 기술 개발 및 자율주행 협업 플랫폼 실증
-
최종목표
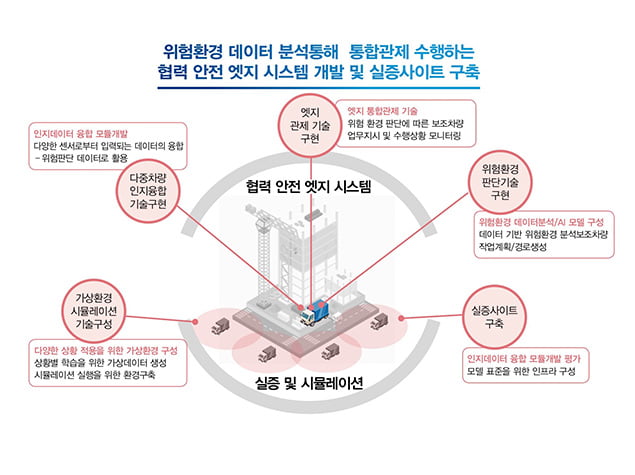
위험환경 데이터 분석을 통해 통합관제 수행하는 협력 안전 엣지 시스템 개발 및 실증사이트 구축
세부 연구개발내용
- 엣지 통합관제 기술 구현
- 위험환경 데이터분석/AI 모델 구성
- 인지데이터 융합 모듈개발 평가 및 실증사이트 구축
- 다양한 상황 적용을 위한 가상환경 시뮬레이션 기술구성
- 다중차량 인지융합 모듈 개발
공동연구개발기관별
담당업무
- 베이리스 - 엣지 통합 관제 시스템 개발
- 한국자동차연구원 - 차량간 인지 융합 알고리즘 개발 및 가상데이터용 HIL 시뮬레이터 개발
- 유니트론텍 - 엣지 통합 관제 시스템 하드웨어 아키텍처 설계
- 미디어그룹사람과숲 - 위험환경 판단 모델 학습 데이터 수집 프로세스 개발
- 텔레컨스 - 다중객체(특장차-보조차) 작업계획 및 경로 생성 지능 모델 개발
- 건설기계부품연구원 - 엣지 통합 관제 시스템 차량 및 보조차량 실증 사이트 구축
- 전북대학교 - 안정성 기반 자율주행 알고리즘 개발 및 성능고도화